首先Webots是一個具備建模、程式設計和模擬移動機器人開發平臺,主要用於地面機器人模擬。使用者可以在一個共享的環境中設計多種複雜的異構機器人,可以自定義環境大小,環境中所有物體的屬性包括形狀、顏色、文字、質量、功能等也都可由使用者來進行自由配置,它使用ODE檢測物體碰撞和模擬剛性結構的動力學特性,可以精確的模擬物體速度、慣性和摩擦力等物理屬性。每個機器人可以裝配大量可供選擇的模擬感測器和驅動器,機器人的控制器可以通過內部整合化開發環境或者第三方開發環境進行程式設計,機器人每個行為都可以在真實世界中測試。
再來是V-REP,堪稱機器人仿真界的NO.1,是全球領先的機器人及模擬自動化軟件平台。V-REP讓使用者可以模擬整個機器人系統而一體(如感測器或機械結構),通過詳盡的應用程序接口(API),可以輕鬆地集成機器人的功能。V-REP可以被使用在遠程監控,硬件控制,快速原型驗證,控制算法開發與參數調整, 安全性檢查,機器人教學,工廠自動化模擬及產品展示等各種領域。V-REP集成開發環境,基於分佈式控制體系結構,每個仿真對象(模型)可以通過嵌入式腳本,一個插件,ROS子系統 ,遠程API客戶端,用戶定制解決方案實現單獨控制。這些極大的擴展了V-REP的功能,並且成為了多機器人系統應用的理想平台。
使用心得:目前使用下來,我覺得webots比較好用,webots的場景逼真又接近於現實,而且也能模擬許多複雜的狀況,在設定上也提供了很多的範本,控制器程式就在旁邊也易於更改。相較之下v-rep的逼真度就比較弱,雖然比webots還易於編輯零件,也比較好在各個零件加入一些感測器或機械結構,可是要一個一個定義也是很麻煩的,模擬上不會說比webots還要差很多,可是v-rep的遠端控制,就贏了webots許多,v-rep能通過應用程序接口,也就是雲端控制系統,能廣泛的應用在許多開發上,解論我個人傾向於使用webots,還是越逼真越好,這樣才是開發者想要的。
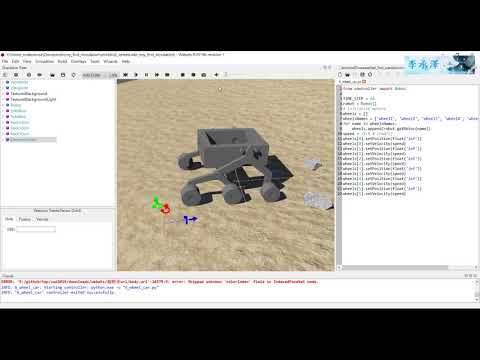
Webots導入和模擬越野車
我使用webots來進行模擬時,非常的繁瑣又很困難,首先是每一個零件檔案,從solvespace轉成wrl之後,導入webots裡面還不能用,還要再把每一個零件的shape導出來成wbo檔,這樣才可以使用我要的形狀,而且每一個組合的點,都不像v-rep這麼簡單,全部都要設定很多...
-
實習任務一 學習要點 本學期的課程將從 https://www.blogger.com 的個人動態網誌建立與維護開始, 讓使用者可以隨時利用瀏覽器, 維護個人網誌內容. 接著再由 Github 帳號的建立, 逐步透過 Github Pages 靜態網頁的建立, ...
-
我跟著老師的教法進行操作,可是遇到了大問題,我無法使用鑰匙 ,可能是因為proxy的問題 。 操作過程: https://www.youtube.com/watch?v=sXFEDF4XziM
-
 老師給我們了幾本書分別是: 1. The Essential Guide to HTML5 - Using Games to Learn HTML5 and JavaScript (2018) https://link.springer.com/book/10.1007/97...
老師給我們了幾本書分別是: 1. The Essential Guide to HTML5 - Using Games to Learn HTML5 and JavaScript (2018) https://link.springer.com/book/10.1007/97...

沒有留言:
張貼留言