2.再來Add>Proximity sensor>Cone type創建感測器。
3.將兩者都設定好,改名並將感測器拖移至球體分支下。
4.加入左右輪並設定其座標位子,再加入一顆小球當支點。
5.將三者改名及設定參數後,每個都增加動力源並設好座標。
4.加入左右輪並設定其座標位子,再加入一顆小球當支點。
5.將三者改名及設定參數後,每個都增加動力源並設好座標。
6.一樣三個都要在球本體(bubbleRob)的分支下,才能相互作用。
7.再來要設定出球本體運動時的動態圖表,有許多設定。
8.創建出數個圓柱體形障礙物將球本體給圍繞起來。
8.創建出數個圓柱體形障礙物將球本體給圍繞起來。
9.新增攝像頭讓球本體移動時,就可以看到它的前視的影像。
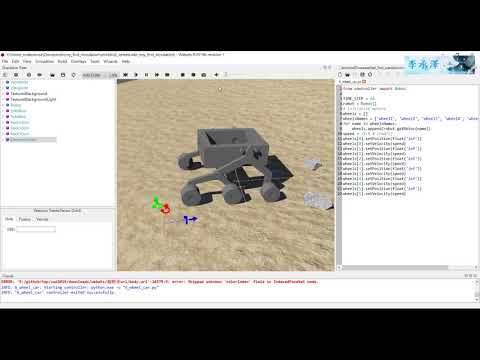
10.將球本體的程式碼功能打開,並且將程式碼複製貼入進去。
11.這樣子球本體就會在感測器照到物體時往後退並且迴避。
我的操作影片(有字幕):https://youtu.be/BStp8J-KXuY


沒有留言:
張貼留言