1.進入2b Task 1的 #14 ,準備操作。
2.開啟start_mdecoursr,進入web_vrep2。
3.編輯templates裡面的controls.html。
4.加入start 和 stop 的botton,直接複製改。
5.編輯vrep_linefollower.py,if加入判斷式。
if direction == 'start':
vrep.simxStartSimulation(self.clientID, vrep.simx_opmode_oneshot)
if direction == 'stop':
vrep.simxStopSimulation(self.clientID, vrep.simx_opmode_oneshot)
6.補上else: ,完成後儲存,記得語法要排好。
7.開啟v-rep程式,將two_wheeler.ttt檔案拖入。
8.再開啟app.py 的go進入網址localhost:5000。
9.這樣子就可以進行start 以及 stop的操作了。
我的教學影片(有字幕):https://youtu.be/fsWnXIUaZN8
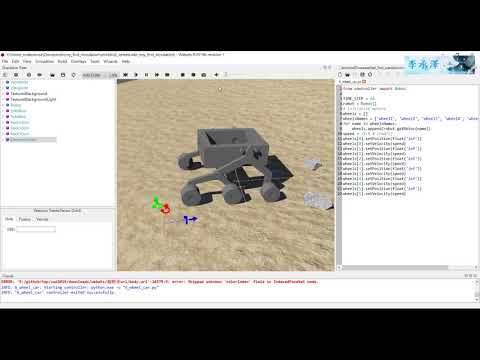
Webots導入和模擬越野車
我使用webots來進行模擬時,非常的繁瑣又很困難,首先是每一個零件檔案,從solvespace轉成wrl之後,導入webots裡面還不能用,還要再把每一個零件的shape導出來成wbo檔,這樣才可以使用我要的形狀,而且每一個組合的點,都不像v-rep這麼簡單,全部都要設定很多...
-
實習任務一 學習要點 本學期的課程將從 https://www.blogger.com 的個人動態網誌建立與維護開始, 讓使用者可以隨時利用瀏覽器, 維護個人網誌內容. 接著再由 Github 帳號的建立, 逐步透過 Github Pages 靜態網頁的建立, ...
-
我跟著老師的教法進行操作,可是遇到了大問題,我無法使用鑰匙 ,可能是因為proxy的問題 。 操作過程: https://www.youtube.com/watch?v=sXFEDF4XziM
-
 老師給我們了幾本書分別是: 1. The Essential Guide to HTML5 - Using Games to Learn HTML5 and JavaScript (2018) https://link.springer.com/book/10.1007/97...
老師給我們了幾本書分別是: 1. The Essential Guide to HTML5 - Using Games to Learn HTML5 and JavaScript (2018) https://link.springer.com/book/10.1007/97...

沒有留言:
張貼留言