1.先畫出基本的輪子,只要畫一個就好了。
2.再來要畫右側前、中輪子結合的連桿機構。
3.然後是畫後輪、前面的連桿、本體的結合桿。
4.最後是畫本體,因為只有單桿結合,所以要畫限制桿。
5.把全部的零件都組起來,以本體為基準來組合。
6.用Export Triangle來分別導出stl檔案以及wrl檔案。
6.分別導入webots以及v-rep,都會是一整個實體的形式。
心得:
這次是要使用solvespace來設計並繪製越野車零組件,我在設計方面想的比較久,尺寸以及形狀跟範例圖,是不太一樣的,但是在架構上基本是相同的,因為是使用solvespace來繪製的,所以我在繪製的時候,耗費了許多的時間,solvespace在繪製功能上有些許的不足,導致我無法使用鏡射,再組合零件上,能約束的條件也很少,畫完存成stl檔以及wrl檔,要轉到v-rep、webots,轉出來的都是一整個實體,所以到時候還要再思考,該如何再轉檔的時候,能直接轉成各個分開的零件。
我的教學影片:https://youtu.be/ZGVvMynspJI
2019年12月26日 星期四
Webots導入wrl圖檔
1.開啟自己在solvespace的雙輪車。
2.用Export Triangle來導出wrl檔。
3.開啟自己用NX12畫的雙輪車。
4.匯出 > VRML > 指定存放位子。
5.用webots的 File > lmport VRML97 。
6.匯入solvespace以及NX12的wrl檔。
首先是solvespace的wrl檔,原本是分開的組合的零件,但是匯入進去就只有一整個實體零件,所以要模擬讓輪胎滾動是不太可能的,再來匯入是NX12的wrl檔,顯示出來的是各個分開的零件,但是跟當初的組合件不太一樣,它會分割的更仔細,這又是一個新的問題了,可是這樣就可以模擬雙輪車移動了,只是要設定好一段時間才能模擬就是了。
我的教學影片:https://youtu.be/mGN6LdPV-lc
2.用Export Triangle來導出wrl檔。
3.開啟自己用NX12畫的雙輪車。
4.匯出 > VRML > 指定存放位子。
5.用webots的 File > lmport VRML97 。
6.匯入solvespace以及NX12的wrl檔。
首先是solvespace的wrl檔,原本是分開的組合的零件,但是匯入進去就只有一整個實體零件,所以要模擬讓輪胎滾動是不太可能的,再來匯入是NX12的wrl檔,顯示出來的是各個分開的零件,但是跟當初的組合件不太一樣,它會分割的更仔細,這又是一個新的問題了,可是這樣就可以模擬雙輪車移動了,只是要設定好一段時間才能模擬就是了。
我的教學影片:https://youtu.be/mGN6LdPV-lc
2019年12月12日 星期四
Webots Tutorial-6
1.一樣另存一個新的檔案。
2.刪掉其他東西,只留牆壁和地板。
3.創建一個robot,將實體加上去。
4.新增一個身體和四個輪子,命名。
5.調整全部的參數、實體位置和軸位置。
6.添加感應器,調整大小和位置。
7.x軸方向要向外,角度是0.3 rad。
8.創建一個python控制器,命名儲存。
9.更改robot的控制器,選擇剛建的。
10.提高robot的高度,模擬測試即可。
2.刪掉其他東西,只留牆壁和地板。
3.創建一個robot,將實體加上去。
4.新增一個身體和四個輪子,命名。
5.調整全部的參數、實體位置和軸位置。
6.添加感應器,調整大小和位置。
7.x軸方向要向外,角度是0.3 rad。
8.創建一個python控制器,命名儲存。
9.更改robot的控制器,選擇剛建的。
10.提高robot的高度,模擬測試即可。
我的操作影片(有字幕):https://youtu.be/vxuzuLsOoUs
Webots Tutorial-5
1.另存一個新的檔案。
2.新增實體在創建連趕及三個型體。
3.設定好三個的形狀、大小及參數。
4.調整位子、重量、密度和質心位置。
5.將物體方向轉正,提高位置。
6.設置啞鈴沒有摩擦力,儲存即可。
2.新增實體在創建連趕及三個型體。
3.設定好三個的形狀、大小及參數。
4.調整位子、重量、密度和質心位置。
5.將物體方向轉正,提高位置。
6.設置啞鈴沒有摩擦力,儲存即可。
我的操作影片(有字幕):https://youtu.be/iJBotPDJ5ME
Webots Tutorial-4
1.一樣先建立新的檔案。
2.創建一個python程式檔。
3.將控制改為現在的程式檔。
4.將教材給的程式複製貼上。
5.儲存之後即可開始模擬。
6.機器會緩慢的閃避障礙物。
2.創建一個python程式檔。
3.將控制改為現在的程式檔。
4.將教材給的程式複製貼上。
5.儲存之後即可開始模擬。
6.機器會緩慢的閃避障礙物。
我的操作影片(有字幕):https://youtu.be/7zeqP98Y2ek
Webots Tutorial-3
1.另存一個新的檔案。
2.更改四個牆壁的顏色及參數。
3.準備將球的外觀做改變。
4.設定所要圖案的路徑,儲存。
5.再來測試渲染模式即可。
我的操作影片(有字幕):https://youtu.be/d25DXY8W_rU
2.更改四個牆壁的顏色及參數。
3.準備將球的外觀做改變。
4.設定所要圖案的路徑,儲存。
5.再來測試渲染模式即可。
我的操作影片(有字幕):https://youtu.be/d25DXY8W_rU
Webots Tutorial-2
1.另存一個新的檔案。
2.創建一個新地板場景和實體球。
3.設定其形狀、位置以及參數。
4.更改球體大小以及命名。
5.將邊界物體訂為剛命名的。
6.創建四面牆壁,儲存並測試。
2.創建一個新地板場景和實體球。
3.設定其形狀、位置以及參數。
4.更改球體大小以及命名。
5.將邊界物體訂為剛命名的。
6.創建四面牆壁,儲存並測試。
我的操作影片(有字幕):https://youtu.be/bE5tuK2tLBU
訂閱:
文章 (Atom)
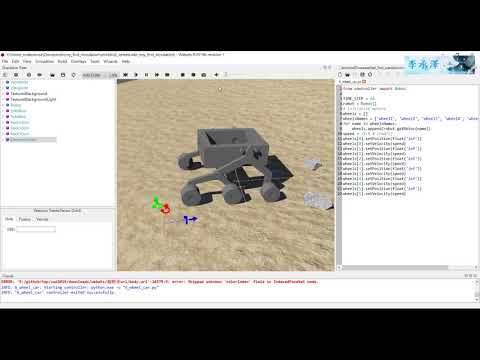
Webots導入和模擬越野車
我使用webots來進行模擬時,非常的繁瑣又很困難,首先是每一個零件檔案,從solvespace轉成wrl之後,導入webots裡面還不能用,還要再把每一個零件的shape導出來成wbo檔,這樣才可以使用我要的形狀,而且每一個組合的點,都不像v-rep這麼簡單,全部都要設定很多...
-
 老師給我們了幾本書分別是: 1. The Essential Guide to HTML5 - Using Games to Learn HTML5 and JavaScript (2018) https://link.springer.com/book/10.1007/97...
老師給我們了幾本書分別是: 1. The Essential Guide to HTML5 - Using Games to Learn HTML5 and JavaScript (2018) https://link.springer.com/book/10.1007/97... -
1.先將 Y:\portablegit\bin下的 sh.exe建立起來。 2.輸入sh,輸入 ssh-keygen -t rsa -b 4096 -C "學號 "。 3.在Y: \home_mdecourse裡創建一個.ssh。 4.輸入 Y: ...
-
實習任務一 學習要點 本學期的課程將從 https://www.blogger.com 的個人動態網誌建立與維護開始, 讓使用者可以隨時利用瀏覽器, 維護個人網誌內容. 接著再由 Github 帳號的建立, 逐步透過 Github Pages 靜態網頁的建立, ...
